1. ábra: A brushless motor és szabályzó működési elve
Egy kép (pláne, ha mozog) felér ezer szóval:
1. ábra: A brushless motor és szabályzó működési elve
Mint látható, a kefe nélküli egyenáramú motor működése megegyezik (miért is lenne más) a hagyományos kefés motorokéval: a forgorész elmozdulásával szinkronban a mágneses teret is változtatni kell, íly módon biztosítva a folyamatos forgatónyomatékot. A trükk abban rejlik, hogy szemben a hagyományos kefés motorokkal, ahol a kommutáció mechanikusan kikényszerített, itt a forgó mágnesek által a tekercsekben indukált feszültséget figyelve állapítja meg a szabályzó áramkör a forgórész pozícióját és kapcsolja a megfelelő tekercsekre az áramot. (Sárga felvillanás az animáción.)
Az 1. ábrán látható motorrajz köszönőviszonyban sincs a boltban kapható RC motorokkal. Nem egy valós működést mutat be, csak az elméletet szemlélteti, ami alapján a brushless motorok működnek. (Mindazonáltal működőképes szerkezet.) A jobb szemléltetés érdekében végletesen le van egyszerűsítve, hogy a lényeg (ti. az elektromos kommutáció) szépen látszódjon. A valóságban van néhány lényegi eltérés:
 )
)
Most, hogy kellően összezavarodott a kedves olvasó, akkor el is mondom konkrétan, hogy is működik a dolog.
Ugorjuk át az indulás nehézségeit, arra majd egy későbbi fejezetben visszatérek. Tegyük fel, hogy a motor már lassan forog a megfelelő irányba.
Ekkor mondjuk az L2 tekercs felé közelít egy mágnes északi pólussal. Ahogy közelít, feszültséget kezd indukálni az L2 tekercsben, mint egy dinamó. (Mivel változik a tekercs körül a mágneses tér.)
Az L2 tekercsben akármilyen áram is folyik, az ennek hatására változni fog.
Ez az áramváltozás a FET-ek csatornaellenállásán (és a vezetékezésén) is feszültségváltozást okoz. (Bár igen pici ez az ellenállás, azért nem 0.)
Ezt detektálja a mikrokontroller, azaz "észreveszi", hogy "jön a mágnes". Ekkor megtörténik a kommutáció, azaz az L2 tekercsre a mikrokontroller
olyan feszültséget kapcsol, hogy az áram által keltett mágneses tér vonzza az érkezőben lévő mágnest. (Mellesleg az előző hajtott tekercsről lekapcsolja.)
Ezt a feszültséget egy ideig tartja a kontroller. Minél tovább tartja, annál erősebbet "húz" L2 tekercs a mágnesen. (V.ö.: teljesítményszabályozás.)
Persze nem célszerű az impulzust még akkor is tovább tartani, amikor a mágnes már távolodóban van, mert akkor éppen hogy visszahúzza, azaz fékezi a mozgást.
Szerencsére a motor szerkezete olyan, hogy a következő kommutáció már megtörténik ez előtt. (Lásd az 5. ábrát.)
Oké, a motor tehát gyorsul. Na de mi határozza meg, hogy meddig fog gyorsulni? Itt jön a képbe újra a mozgó mágnes által indukált feszültség. (Ami ugye számunkra eddig csak a kommutáció detektálásában játszott.) Nos, aki tekert már biciklidinamót, az tudja, hogy minél gyorsabban tekeri, anál jobban világit a lámpa: annál nagyobb a feszely. Ez itt sincs másként. Ahogy a motor gyorsul, egyre nagyobb feszültséget indukálnak a mágnesek a tekercsekben, mikor elhaladnak a közelükben. Hogy-hogy nem, ez pontosan ellene dolgozik annak a feszültségnek, ami a kontrollerből érkezik és a tekercsen áramot hajtana át, aminek mágneses tere a mágnesekre hatva gyorsítaná azok mozgását. Vegyünk egy példát: a forgó mágnesek által indukált feszültség mondjuk legyen 5V. A tekercsre kapcsolt 3 cella LiPo aksi 12V-jából ez levonódik, így a tekercsen eső feszültség 7V lesz. Ez a 7V a tekercsen áthajt x áramot. Ennek mágneses tere fogja gyorsítani a motort. Tegyük fel, hogy a motor gyorsabban forog. Az indukált feszültség 10V. Ha ezt ismét levonjuk a 12-ből, akkor már csak 2V jut a tekercsre, ami jóval kevesebb áramot eredményez! Csodálatos a fizika, nem? Ha a motor sebessége elérné azt a szintet, ahol az indukált feszültség megegyezik az akkumulátorokból a tekercsekre kapcsolt feszültséggel, a tekercseken már nem folyna áram, így nem lenne, ami tovább gyorsítsa a motort. Természetesen technikai okokból ez sohasem történik meg. Mindíg van ugyanis veszteség, ill. terhelés, ami lassítja a motor forgását. De egy egyensúlyi állapot kialakul, amikor a motor pont akkora teljesítményt vesz fel, mint amit lead mozgás közben. (Ismét igazolódott az energia nem vész el, csak átalakul elve. Kemények ezek a fizikai törvények.)
Éles eszű olvasók mire ide értek az olvasással, már meg is fejthették, mi az a KV. (Már feltéve, ha találkoztak valaha is ezzel az RC modellezésben használatos motorokra jellemző xxxx fordulat/perc/volt dimenziójú mennyiséggel.) A KV azt mutatja meg, mekkora fordulatszám változás okoz
1V indukált feszültségváltozást a motorban. Tehát ha generátorként hajtom, mekkora fordulatszám növeléssel tudom a kimeneti feszültségét 1V-al emelni.
(Az indukált feszültség sokmindentől függ, de főleg azoktól az értékektől, amik az indukció képletében szerepelnek: a mágnesek erejétől, a tekercsenkénti menetszámtól
és a fordulatszámtól.) Ez mezei modellezőknek arra jó, hogy megtudják, mekkora feszültséggel mekkora fordulatszámot tudnak elérni.
Mi viszont sokkal okosabbak lettünk és azt is értjük, hogy miért.
Sőt nem csak ezt értjük, hanem most már azt is, hogy miért gyengül el a motor ahogy egyre nő a fordulatszáma és ha terhelés hatására esik a fordulatszám miért vesz
fel nagyobb áramot.
A szabályzó tartalmaz egy mikrokontrollert (az 1. sz. ábrán µC jelöléssel), ami gyakorlatilag egy mini számítógép, CPU-val 1-2kB EEPROM-mal, RAM-mal és I/O egységekkel. A rádiótól jövő jelet fogadja (ez nincs az 1. ábrán) és szabályozza a motort.


2. ábra: A mikrokontroller a szabályzón
A szabályozás során az egyes tekercs kivezetésekre felváltva hol a negatív, hol a pozitív tápot kapcsolja a µC. Ehhez MOSFET-eket használ, mivel:
 )
Az 1. ábrán 11 és 12 végződésű (p-channel) FET-ek típusa egy általam szétszedett szabályzón GSC4435, míg
a 21 és 22 végűek (n-channel) IRF7811A. Előbbiből 3, utóbbiból 2 van párhuzamosan kötve kimenetenként.
)
Az 1. ábrán 11 és 12 végződésű (p-channel) FET-ek típusa egy általam szétszedett szabályzón GSC4435, míg
a 21 és 22 végűek (n-channel) IRF7811A. Előbbiből 3, utóbbiból 2 van párhuzamosan kötve kimenetenként.
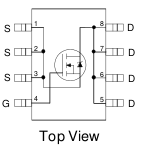

3. ábra: A FET-ek tokozása (A tokon ponttal jelölt az 1. láb.)
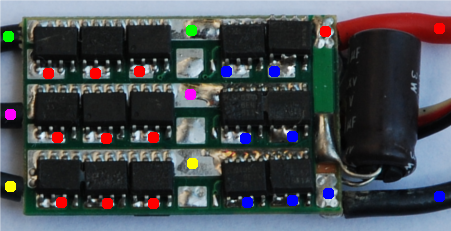
4. ábra: A FET-ek a szabályzón
A színes pöttyök a galvanikusan összetartozó pontokat jelölik. A nyák-on az összeköttetések nem láthatóak, mivel többrétegű, furatgalvanizált és a két táp a két középső réteghez kapcsolódik. De egy kéziműszerrel könnyen beazonosíthatóak a FET-ek: csak meg kell mérni, melyik csoport SOURCE-a melyik betáp vezetékkel van összekötve.
A forgásirány kérdése két esetben merül fel: a motor indításakor és akkor, ha mi magunk szeretnénk megváltoztatni.
Megj: vannak hall elemet tartalmazó brushless motorok, amikben akár még álló állapotban is megállapítható, hogy áll a forgórész. Ez az iromány azonban az RC modellező körökben használt olcsó motorokkal foglalkozik, így ezt nem részletezem.
Ám mindenekelőtt a leglényegesebb, hogy meg lehessen biztonsággal határozni, hogy a motor éppen merre forog. Sok mérnök sokat gondolkodott rajta (vagy nem) és egy elmés megoldással rukkoltak elő. (Túl azon, hogy a tekercsek előtt elhaladó mágnesek által indukált feszültséget detektálja a szabályzó.) A brushless motorokat úgy alakították ki, hogy a három tekercsben szépen egymás után indukálódjon feszület és a sorrendből a forgásirány megállapítható legyen. Íme a trükk:
 5. ábra: Az elektromos kommutációs jelek sorrendjének forgásirányfüggősége
5. ábra: Az elektromos kommutációs jelek sorrendjének forgásirányfüggőségeMint látható, ha a forgórész az óramutató járásával megegyező irányba forog, az indukált feszely sorrendje L3,L2,L1. Ellenkező irány esetén (a filmet visszafelé játszva le) L1,L2,L3.
Ennek a motorkialakításnak van még más előnye is: a motor a 120°-os elforgatásra szimmetrikus. Amint a mágnesek megtesznek 120°-ot, ugyanabba az állapotba kerülnek vissza. Azaz tulajdonképpen 3x ismétlődik ugyanaz a motor kerületén, mintha 3 darab motor lenne párhuzamosan. Ez az 5. ábrán szépen látható. A tekercselést ennek megfelelően kell végezni:
.gif) 6. ábra: 9 pólusos brushless motor tekercselése
6. ábra: 9 pólusos brushless motor tekercselése
Nem csak az érzékelő jelek érkeznek ilyen szép szabályos sorrendben, de az áramot is ugyanebben a sorrendben kell kapcsolni az egyes tekercsekre, hogy a motor az adott irányba forogjon. Bele lehet őrülni, de igaz: ha bármelyik két tekercset felcseréljük, a forgás iránya megfordul. Tessék kipróbálni a fenti animáción: ha gondolatban felcseréljük bármely két tekercset, de a villogási sorrendjük marad L3,L2,L1, a villogás iránya megfordul. (Most ugye jobbról balra halad a "futófény".) Magyarán mi a teendő, ha egy brushless motor a nem megfelelő irányba forog? A szabályzóra kötött bármelyik két motorkivezetést fel kell cserélni. Ennyi. Az indításkori forgásirányváltás problémájával a következő fejezet foglalkozik.
A FET-ek vezérlőfeszültségét (GATE A,B,C), ill. a 2. tekercsen megjelenő, mágnes okozta indukált feszültséget (EMK-B) mutatja az alábbi ábra: 7. ábra: A szabályzó vezérlő és érzékelő jelei
7. ábra: A szabályzó vezérlő és érzékelő jeleiMegvan tehát, hogyan állapítja meg a forgásirány a szabályzó. Mikor a motor forog. Indításkor azonban áll (Míly meglepő!), így fizikai képtelenség megállapítani, milyen pozícióban van a forgórész. Pedig ez fontos volna, mert nem mindegy, hogy a 3 tekercs közül melyikkel kezdjük a forgatást. Hát akkor honnan tudja a szabályzó, hogy kell kezdeni az indulást? A válasz egyszerű és meglepő: sehonnan. "Bepróbálkozik" valamelyik tekerccsel, elindul alacsony teljesítménnyel és megnézi, hogy jó irányba és a megfelelő időben jönnek-e az indukciós jelek. (Bizony még akár a másik irányba is elindulhat, attól függően, hogy állnak a mágnesek.) Ha nem nyert a dolog, lefékezi a forgást és bepróbálkozik mással. Intelligenciától függően ez pár próbálkozás után sikerül, és beindul a forgás. Ezért "rángatóznak" a brushless motorok induláskor.
 8. ábra: A motortól a mikrokontrollerhez vezető jelvezetékek
8. ábra: A motortól a mikrokontrollerhez vezető jelvezetékek
A motorra a legritkább esetben szerencsés ráadni a teljes kakaót. Indításkor például egyenesen öngyilkosság: mivel ekkor a motor még nem forog, az indukciós feszültség 0, tehát a tekercsen átfolyó áram egyetlen korlátja a tekercs Ohm-os ellenállása, ami hamar füsthöz vezetne mind a tekercselésben, mind a túláramtól szélütést kapott FET-ekben. Oké, de hogyan korlátozzuk az áramot? Ellenállással nyílván nem jó, mert az is csak hővé alakítja a felesleget, mi pedig modelleket szeretnénk építgeni, nem rezsót, ugye.
A megoldás digitális: ha nem bírja megenni az egészet, vágjunk neki pici darabokat! A tápfeszültség csökkentése nem jöhet szóba, tahát az időt kell rövidíteni, amíg kapja a motor tekercselése. Ez történhet úgy, hogy a feszültséget a kommutációt követően csak rövid időre kapcsoljuk rá (impulzus-szélesség modulált teljesítményszabályozás), de úgy is, hogy apró darabokban adagoljuk a teljes ciklus során, mint az alábbi ábra is mutatja:
 9. ábra: Teljesítményszabályozás a vezérlőjel megszaggatásával
9. ábra: Teljesítményszabályozás a vezérlőjel megszaggatásával
Van az úgy, hogy az ember nem akarja, hogy a motor pörögjön. A puszta lassítás könnyen megoldható, mindössze a kommutáció során késve kell ráadni a feszültséget a tekercsekre, máris visszafelé húzza a mágneseket. Na de álló motort hogy tartunk a helyén? Két módszer képzelhető el:
A BEC (Battery Eliminator Circuit = áramforrás kiváltó áramkör) egy megoldás, ami arra szolgál, hogy a vezérlőelektronikának (vevő egység, szervók) ne legyen szükségük önálló akkumulátorra. Ezek az egységek egyébként stabil 5V-ot igényelnek. A megoldás roppant egyszerű: a szabályzó a rá kötött akkumulátorból egy stabilizátor áramkörrel előállít 5V-ot, mely a vevőegység csatlakozójára van kötve. Így amikor bedugjuk a szabályzót a vevőbe, az olyan, mintha egy tápegységet dugnánk be. Mivel a vevő összes kimenetének "-" és "+" lábai közösítve vannak, egyuttal az összes rá dugott szervó is "rádugódik" a szabályzó által szolgáltatott 5V-ra.
10. ábra: Az 5V-os "stabkockák" a szabályzón
A szabályzón két db 7805-ös típusú stabilizátor áramkör van. Az egyik magának a mikrokontrolleres szabályzó áramkörnek szolgáltat stabil 5V-ot, a másik a BEC.A három tekercset nem csak csillag módon, hanem deltában is össze lehet kötni. Ami egy modellező számára érdekes, hogy ez nem okoz a szabályzó működésében problémát, az elv nem változik, mindent ugyanúgy lehet csinálni. Amik változnak, azok a motor tulajdonságai. Más a két formációnak a viselkedése. Késhegyre menő viták vannak különböző RC modellező fórumokon, hogy melyik a jobb. A deltának nagyobb a nyomatéka, nagyobb fordulat érhető el vele, viszont nagyobb a felvett árama is. Ezt már a tekercselésnél illik figyelembe venni. Itt egy kis angol iromány, akit konkrétabb dolgok érdekelnek, de a net is tele van vele.
Jómagam képzett erősáramú-berendezés szerelőként (Nincs valaki, aki tudja, hogy kell ezt helyesen leírni?) és mint villamos mérnök csak annyit tennék hozzá, hogy nagy 3 fázisú motoroknál csillagban idndítanak és felpörgés után kapcsolják deltába. De ez RC modellező körökben, mivel ez csak a motor megbontásával lehetséges, nem megvalósítható. (Persze nem kizárt, hogy ha mind a 6 kivezetés meglenne, akkor lehetne egy olyan áramkört építeni, ami... De ez egy másik történet.) Az általánosan elterjedt motorok csillagba vannak kötve. Lágyabb, tisztább érzés. Főleg induláskor. Versenyfanok kísérletezzenek a "harapós" deltával.
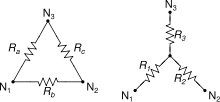 11. ábra: Tekercsek csillagba és a deltába kötve
11. ábra: Tekercsek csillagba és a deltába kötve 12. ábra: Brushless motor deltába kötve
12. ábra: Brushless motor deltába kötve 13. ábra: Brushless motor csillagba kötve
13. ábra: Brushless motor csillagba kötveEgy brushless motor gyorsulás közben megfigyelve, villamos mérnökök által. Egyszerű, mint a pofon:
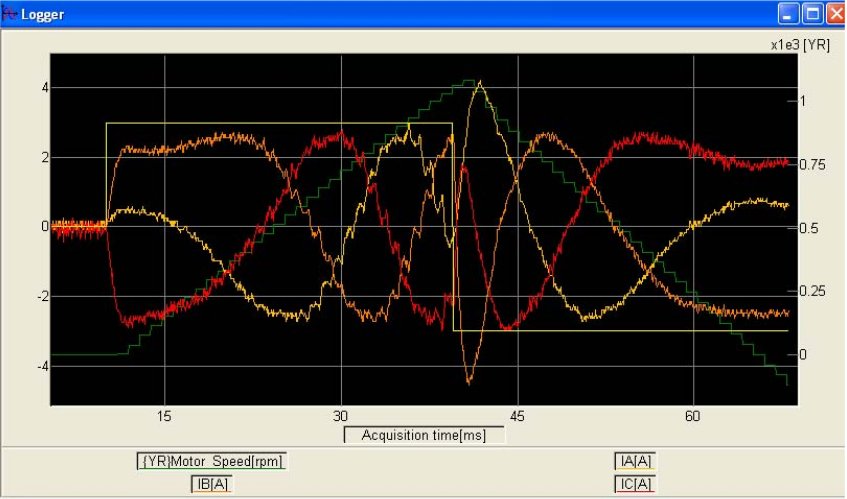 Forrás: DTrends_May_2008
Forrás: DTrends_May_2008
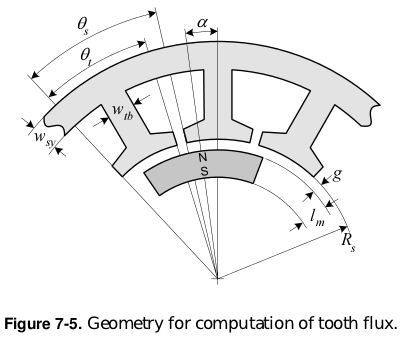
Aki pedig úgy gondolná, hogy a vasmagokat hasraütésre méretezik, annak a figyelmébe ajánlanám ezt: